Drive-01
Consisted of 8 driving events in a 11-12 minutes drives:
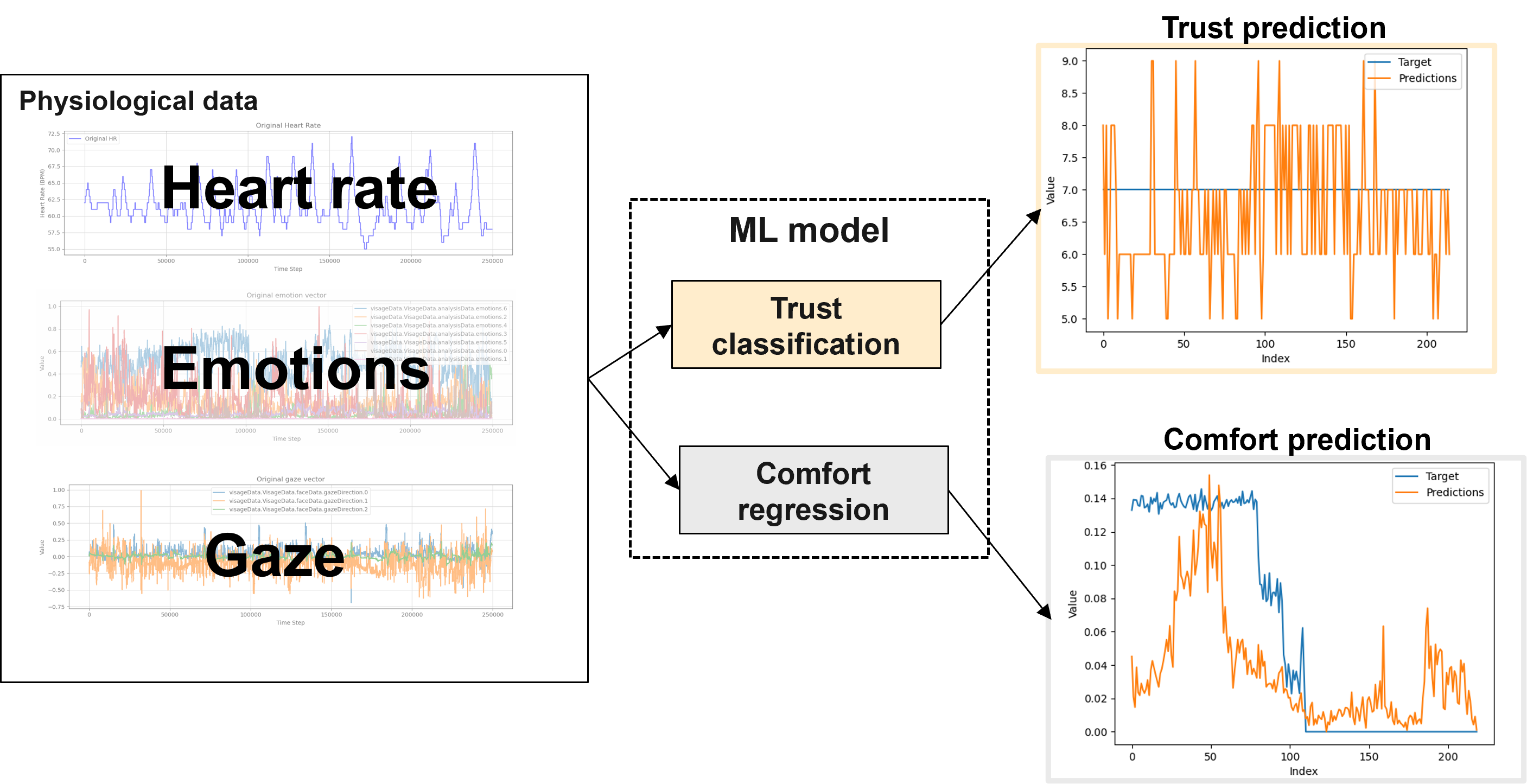
TRUCE-AV is a state-of-the-art multimodal benchmark dataset for trust and comfort estimation in autonomous vehicles Understanding and estimating driver trust and comfort are essential for the safety and widespread acceptance of autonomous vehicles. Existing works analyze user trust and comfort separately, with limited real-time assessment and insufficient multimodal data.
Our dataset has the following key features:
Our dataset enables the development of adaptive AV systems capable of dynamically responding to user trust and comfort levels non-invasively, ultimately enhancing safety, user experience, and human-centered vehicle design.
The data collected from multiple sensors is synchornised and combined into one file per participant per drive. Various events reflecting real-world driving scenarios were administered throughout both the drives to trigger physiological reactions.
If you have any questions regarding the dataset please contact: Aditi Bhalla
Consisted of 8 driving events in a 11-12 minutes drives:
Consisted of 7 driving events in a 11-12 minutes drives:
To demonstrate the utility of our dataset, we evaluated various machine learning models for trust and comfort estimation using physiological data. Our analysis showed that tree-based models like Random Forest and XGBoost and non-linear models such as KNN and MLP regressor achieved the best performance for trust classification and comfort regression.
| Category | Model | Accuracy (Mean) | F1-score (Mean) | Precision (Mean) | Recall (Mean) |
|---|---|---|---|---|---|
| Linear models | Logistic Regression | 26.06% | 10.24% | 26.82% | 12.67% |
| LinearSVC | 25.98% | 9.29% | 15.98% | 12.34% | |
| Ridge classifier | 25.98% | 9.27% | 15.66% | 12.34% | |
| SGD classifier | 20.58% | 9.50% | 12.22% | 11.58% | |
| Tree-based models | Random Forest | 94.42% | 93.73% | 96.18% | 91.61% |
| HistGradient Boosting | 76.92% | 76.34% | 79.76% | 73.63% | |
| XGBoost | 82.64% | 83.49% | 86.72% | 80.83% | |
| LightGBM | 76.12% | 76.46% | 79.63% | 73.91% | |
| Nonlinear/other models | KNN | 78.83% | 74.27% | 72.11% | 77.49% |
| MLP classifier | 51.68% | 45.56% | 46.48% | 45.42% |
| Category | Model | R² (Mean) | MAE (Mean) | RMSE (Mean) |
|---|---|---|---|---|
| Linear models | Linear regression | 0.0106 | 0.0451 | 0.1072 |
| Ridge regression | 0.0107 | 0.0451 | 0.1072 | |
| Tree-based models | Random Forest | 0.1633 | 0.0404 | 0.0985 |
| Gradient Boosting | 0.0781 | 0.0429 | 0.1034 | |
| XGBoost | 0.1480 | 0.0414 | 0.0994 | |
| Nonlinear models | SVR (RBF Kernel) | 0.1452 | 0.0716 | 0.0996 |
| MLP Regressor | 0.1714 | 0.0536 | 0.0981 |
We welcome submissions. If you use the dataset please cite the following publication.
@misc{bhalla2025truceavmultimodaldatasettrust,
title={TRUCE-AV: A Multimodal dataset for Trust and Comfort Estimation in Autonomous Vehicles},
author={Aditi Bhalla and Christian Hellert and Enkelejda Kasneci and Nastassja Becker},
year={2025},
eprint={2508.17880},
archivePrefix={arXiv},
primaryClass={cs.HC},
url={https://arxiv.org/abs/2508.17880},
}